


Project Overview
Smartphone-Driven Educational Humanoid
The Challenge
The goal of this ongoing project is to develop a highly accessible, low-cost educational humanoid robot that upcycles an unused household smartphone as its primary control system. By leveraging the processing power, screen, and sensors already built into a standard phone, the robot is designed to process user inputs and react with physical actions. The primary engineering challenge is creating a budget-friendly electromechanical system from the ground up, utilizing simple motors and affordable components to make robotics more accessible for educational purposes.
My Role: Sole Hardware Developer
As the sole creator of this self-led project, I am managing the complete end-to-end hardware development. I am responsible for designing the physical structure entirely from scratch, selecting and integrating all motors, crimping custom connectors, routing the electrical wiring, and performing the final mechatronic assembly.
Hardware Architecture & Design
To ensure the robot remains affordable while still being highly interactive, I focused on a ground-up custom build optimized for simple components:
Full humanoid CAD (same overview as project index)
13-DOF Humanoid Structure
I architected the complete physical framework to support 13 degrees of freedom, enabling a wide range of expressive and interactive motions. The body is designed specifically to house simple, low-cost motors while maintaining the structural rigidity needed for smooth movement.

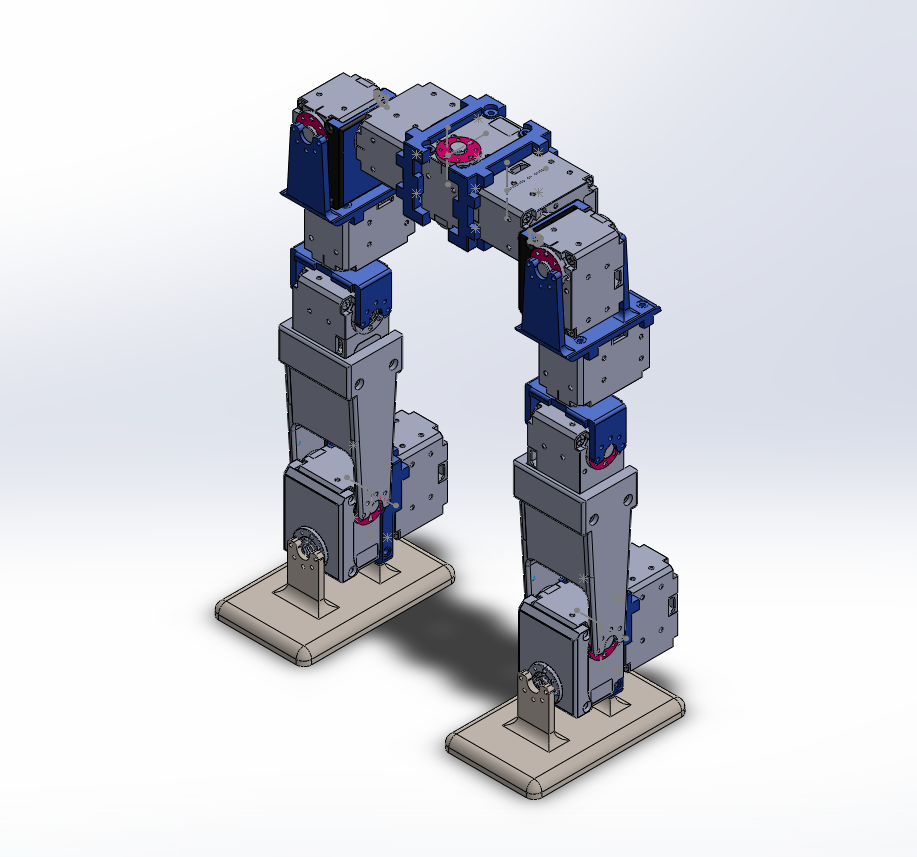
Physical leg assembly and packaging for motion hardware
Smartphone Integration
The physical design centers around securely mounting a repurposed smartphone to act as the robot's "brain" and "face." The mechanical interface securely holds the device while ensuring its screen and sensors remain unobstructed so it can react directly to the user.
Walking simulation—motion check alongside harness routing and joint bring-up
Custom Wiring & Power Distribution
Because this is a custom build, I manually mapped and assembled the entire electrical architecture. This involves cutting and crimping all connectors by hand, and carefully routing the wiring through the robot's joints to prevent snagging during dynamic motion and keep the system visually clean.